-
![焊接机器人如何选配外部轴]()
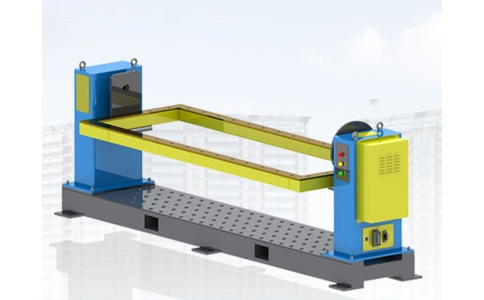
焊接机器人如何选配外部轴
焊接机器人在实际使用中经常需要配备外部轴,以完成工件的焊接。所以今天我们说焊接机器人的外轴是什么,而焊接机器人的外轴包含这些。 一:水平定位器,很多工件需要焊接在正反两面,此时需要安装水平定位器,即将需要焊接在水平定位器上的工件固定..机器人焊接完成后,定位器自动翻转到另一侧进行焊接..水平定位器分接头式和非接头式,是指可以与焊接机器人配合的任意角度的关机焊接..非连接意味着只有
2020-03-26 aipaae
-
![焊接机器人的主要结构形式及性能]()
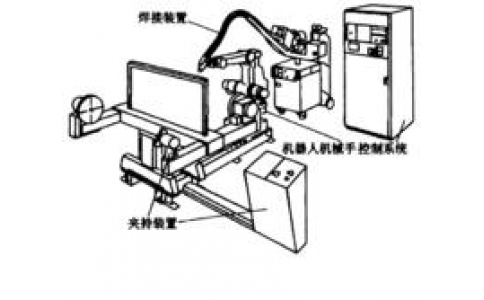
焊接机器人的主要结构形式及性能
世界各国生产的焊接用机器人基本上都属关节机器人,绝大部分有6个轴。其中,1、2、3轴可将末端工具送到不同的空间位置,而4、5、6轴解决工具姿态的不同要求。 焊接机器人本体的机械结构主要有两种形式:一种为平行四边形结构,一种为侧置式(摆式)结构,如图所示。焊接机器人示意图 侧置式(摆式)结构的主要优点是上、下臂的活动范围大,使机器人的工作空间几乎能达一个球体。因此,这种机器人可倒挂在机架上工作,
2020-03-26 aipaae
-
![便携式小型化焊接机器人]()
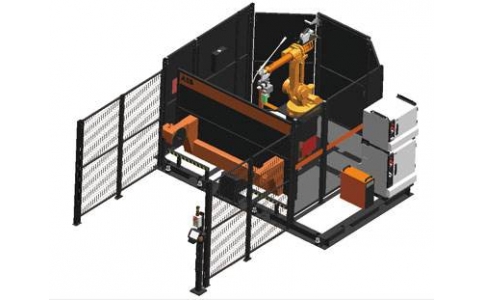
便携式小型化焊接机器人
便携式小型化焊接机器人。图片与本文无关背景技术:现在的工业焊接机器人大部分是固定式的焊接机器人,大多数要依赖示教编程和工装夹具或机器人工作站才能实现自动化焊接。且焊接机器人本体尺寸大,不适应现场移动、不适应现场快速组装;重量重,不适应便携移动、不适应搭配组装。对于造船、海洋工程、桥梁钢结构、钢结构建筑、化工机械和起重机械等重型机械的制造大部分不是批量生产,大多数是单个生产,很少采用标准化生产线进行
2019-12-17 aipaae
-
![自动化机器人焊接辅助工装]()
自动化机器人焊接辅助工装
自动化机器人焊接辅助工装,属于焊接辅助工装制造技术领域:。背景技术::焊接工装是一套柔性的焊接固定、压紧、定位的夹具。主要用于焊接各种可焊接材料的焊接,大、中、小型材料的焊接。三维柔性焊接工装广泛适用于钢结构、各种车辆车身制造、轨道交通焊接、自行车摩托车制造、工程机械、框架和箱体、压力容器、机器人焊接、钣金加工、金属家具、设备装配、工业管道等焊接以及检测系统。现有技术公开申请号为CN2016212
2019-12-17 aipaae
-
![一体式智能焊接机器人系统及焊接方法与流程]()
一体式智能焊接机器人系统及焊接方法与流程
一体式智能焊接机器人系统及焊接方法。背景技术:目前在进行大型焊接件生产中,为了提高焊接作业的工作效率和焊接质量,往往是通过单台或多台全自动焊接机器人进行焊接作业,为了他有效的提高焊接机器人的工作效率和运行性能,因此当前往往采用每台焊接机器人均独立设置有各自的控制系统,这种方式虽然可以满足焊接机器人工作运行的需要,但却造成了当多台焊接机器人同时工作时,各焊接机器人工作间缺乏有效的协调性和必要的安全防
2019-12-17 aipaae
-
![自动定位焊接机器人系统的制作方法]()
自动定位焊接机器人系统的制作方法
自动定位焊接机器人系统的制作方法自动定位焊接机器人系统属于工业机器人领域。焊接机器人是工业生产中应用最广泛的机器人技术,尤其在汽车及工程机械等部门。在国际上,对焊接组件的每个工步进行详细分类、精确定位,焊接生产线冗长,投资费用高。适用于大批量生产。国内焊接机器人系统由于资金及现有设备等因素的影响,大多采用变位机夹具装置,对于小型工件常把数十个零件由变位机夹具装置集中定位夹紧,进行集中焊接。对于大型
2019-12-17 aipaae
-
![焊接轿车车身零部件的小型弧焊机器人工作站的夹具底座的制作方法]()
焊接轿车车身零部件的小型弧焊机器人工作站的夹具底座的制作方法
焊接轿车车身零部件的小型弧焊机器人工作站的夹具底座。背景技术:目前,在汽车零部件行业,存在着自动化程度不高,不具备柔性化生产能力的情况,特别是焊接夹具,针对不同的焊接总成,需要不同的焊接夹具,造成二次投入较大。对于弧焊机器人工作站,较多采用翻转台式夹具,将平台的两个面均安装夹具,提高了设备利用率,但成本相对较大,结构复杂,不太适用于小型弧焊机器人工作站。实用新型内容本实用新型的目的就是为了克服上述
2019-12-17 aipaae
-
![储气罐端盖焊接的多机器人协同焊接工作站]()
储气罐端盖焊接的多机器人协同焊接工作站
储气罐端盖焊接的多机器人协同焊接工作站。背景技术:工业生产过程中,很多设备需要焊接,例如储气罐盖体是包含支撑管、补强板、内接头、阻液罩等多种不同零件焊接而成,且储气罐对于罐体的密封性能有严格的要求,所以在实际生产中绝大多数采用手工焊实现,手工焊接在零件的拼装时容易出现误差,而且手工焊接的焊缝不连续,并且由于各个焊工的水平不同,焊缝的质量也参差不齐;手工焊接作业量过大,且焊接时产生的气体和弧光易对人
2019-12-17 aipaae